[TOC]
Overview
- https://en.wikipedia.org/wiki/HoloLens_2
- https://docs.microsoft.com/zh-cn/hololens/
- Hololens 2 Display Evaluation (Part 1: LBS Visual Sausage Being Made)
Hololens 硬件
计算平台
- Qualcomm Snapdragon 850
- HPU
设备体系结构
- x86 = HoloLens(第一代)
- ARM = HoloLens 2
传感器
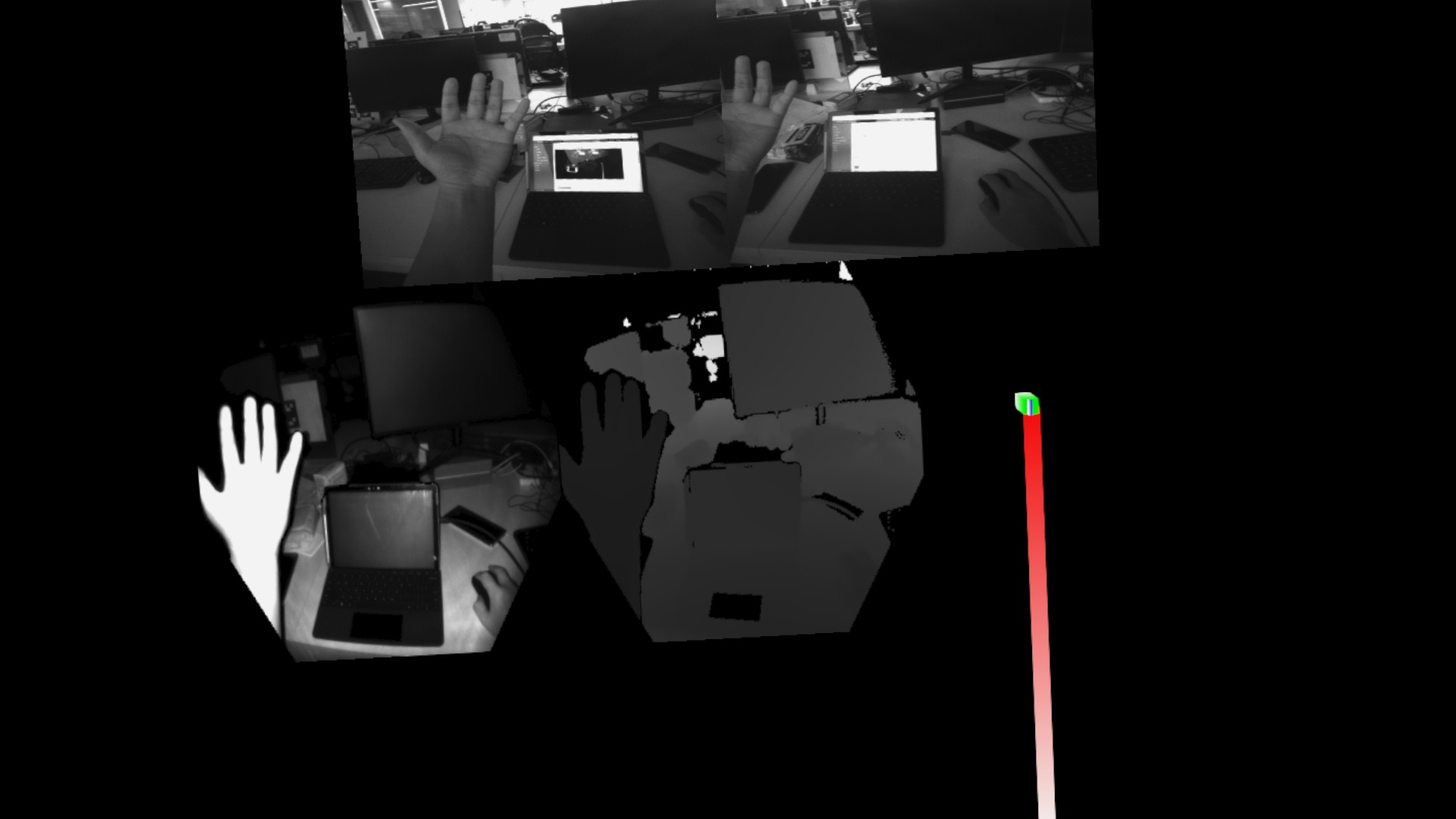
深度相机
一个ToF相机,两种工作模式
- AHAT,高频率 (45 FPS) 用于手部跟踪的近深度运动。 与第一个版本的短引发模式不同,AHAT 提供伪深度,其相位包装超过 1 米。
- 高引发、低频率 (1-5 FPS) 空间映射使用的远深度探测
Project Kinect for Azure
VLC Camera
4个,用于头部跟踪
IR Camera
2个,用于眼部跟踪
IMU
- Gyro
- Acc
- Mag
麦克风阵列
- 5通道
光学组件
- 光引擎
- 波导
- 组合器
其他
- 散热
- 神经网络:识别 先粗再细
- 材料
- 碳纤维
功能分析
- 头部跟踪
- 眼部跟踪
- 手势识别
- 空间建图
- 空间定位
Microsoft HoloLens App
Windows 10 上无法连接设备???
Windows 设备门户
- ref: 使用 Windows 设备门户
- Wifi
- HoloLens 和 PC 处于同一局域网
- 浏览器
- 登录:
https://<HOLOLENS-IP>(目前用户名和密码:hongchen) - 配置:
https://<HOLOLENS-IP>/devicepair.htm(新建用户名和密码,有则忽略)
- 登录:
- USB(TODO:
127.0.0.1:10080???)- 浏览器
https://<UsbNcm-IP>
- 浏览器
HoloLens 研究模式
- ref
- 在 Windows 设备门户 打开 研究模式:
- System -> Research mode -> Allow access to sensor streams
- Raw sensor data
- Getting raw data from sensors
- 需要打开 HoloLens 研究模式
HoloLensForCV
- https://github.com/microsoft/HoloLensForCV
HoloLens2ForCV
- https://github.com/cggos/HoloLens2ForCV
开发环境
- 根据工程中文档说明安装相关工具
部署样例
- Visual Studio 打开某一工程,例如 SensorVisualization
- 配置管理器:
Debug | ARM64 - 部署
- USB(调试器 选择 设备)
- WiFi(调试器 选择 远程计算机,输入 Hololens IP地址)
- 构建
- 调试运行
注意:
- 第一次连接设备运行需要PIN码(Hololens开发人员选项->配对)
- 每个应用第一次部署,需要在Hololens端 同意访问Camera,否则会报“拒绝访问”的错误
- 应用部署前,需要设备处于登录状态,否则会报“拒绝访问”的错误
Samples
SensorVisualization
StreamRecorder
- StreamRecorderApp
- files
- xxx_head_hand_eye.csv
- xxx_pv.txt
- Depth Long Throw_extrinsics.txt
- Depth Long Throw_lut.bin
- Depth Long Throw_rig2world.txt
- Depth Long Throw.tar
- PV.tar
-
plot rig2world.txt
# get rig2world.kitti python StreamRecorderConverter/rig2world_to_kitti.py --dir ./output/2021-11-17-223707/ # evo evo_traj kitti rig2world.kitti -p --plot_mode xz
- files
-
StreamRecorderConverter
-
scripts
python StreamRecorderConverter/recorder_console.py --workspace_path ./output/ --dev_portal_username hongchen --dev_portal_password hongchen --dev_portal_address 192.168.1.100 # or only process all python StreamRecorderConverter/process_all.py --recording_path output/2021-11-17-223707/ -
issues
- Q: ssl.SSLCertVerificationError: [SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1091)
- A: And uncheck SSL connection from Preferences under system at Windows Device Portal.
-
output
dev_portal_address 192.168.1.102 Connecting to HoloLens Device Portal... => Connected to HoloLens at address: http://192.168.1.102 Searching for StreamRecorder application... => Found StreamRecorder application with name: 31fa9d1a-a222-4878-a6fc-77aff92195b5_1.0.0.0_arm64__ph1m9x8skttmg Searching for recordings... => Found a total of 7 recordings Available commands: help: Print this help message exit: Exit the console loop list: List all recordings list_device: List all recordings on the HoloLens list_workspace: List all recordings in the workspace download X: Download recording X from the HoloLens download_all: Download all recordings from the HoloLens delete X: Delete recording X from the HoloLens delete_all: Delete all recordings from the HoloLens process X: Process recording X [ 0] 2021-11-03-005026 [ 1] 2021-11-17-223707 [ 2] 2021-11-18-003216 [ 3] 2021-11-18-004432 [ 4] 2021-11-18-005937 [ 5] 2021-11-18-011202 [ 6] 2021-11-18-012204 Welcome to the recorder shell. Type help or ? to list commands. (recorder console) ? Available commands: help: Print this help message exit: Exit the console loop list: List all recordings list_device: List all recordings on the HoloLens list_workspace: List all recordings in the workspace download X: Download recording X from the HoloLens download_all: Download all recordings from the HoloLens delete X: Delete recording X from the HoloLens delete_all: Delete all recordings from the HoloLens process X: Process recording X (recorder console) list Device recordings: [ 0] 2021-11-03-005026 [ 1] 2021-11-17-223707 [ 2] 2021-11-18-003216 [ 3] 2021-11-18-004432 [ 4] 2021-11-18-005937 [ 5] 2021-11-18-011202 [ 6] 2021-11-18-012204 Workspace recordings: => No recordings found in workspace (recorder console) download 1 Downloading recording 2021-11-17-223707... => Downloading: 2021-11-17-223707_head_hand_eye.csv => Downloading: 2021-11-17-223707_pv.txt => Downloading: Depth Long Throw.tar => Downloading: Depth Long Throw_extrinsics.txt => Downloading: Depth Long Throw_lut.bin => Downloading: Depth Long Throw_rig2world.txt => Downloading: PV.tar (recorder console) Downloading recording 2021-11-17-223707... => Skipping, already downloaded: 2021-11-17-223707_head_hand_eye.csv => Skipping, already downloaded: 2021-11-17-223707_pv.txt => Skipping, already downloaded: Depth Long Throw.tar => Skipping, already downloaded: Depth Long Throw_extrinsics.txt => Skipping, already downloaded: Depth Long Throw_lut.bin => Skipping, already downloaded: Depth Long Throw_rig2world.txt => Skipping, already downloaded: PV.tar (recorder console) process 1 => Recording does not exist (recorder console) process 2 => Recording does not exist (recorder console) list Device recordings: [ 0] 2021-11-03-005026 [ 1] 2021-11-17-223707 [ 2] 2021-11-18-003216 [ 3] 2021-11-18-004432 [ 4] 2021-11-18-005937 [ 5] 2021-11-18-011202 [ 6] 2021-11-18-012204 Workspace recordings: [ 0] 2021-11-17-223707 (recorder console) process 0 Extracting output/2021-11-17-223707/Depth Long Throw.tar Extracting output/2021-11-17-223707/PV.tar Processing images ..................................................................................................................... Saving point clouds ..................................................................................................................... Average PV delta: -0.171ms, fps: -5860.911 Average Depth Long Throw delta: -22.223ms, fps: -44.999 Average hand/head delta: 17.628ms, fps: 56.728 (recorder console)
-
软件开发
Core App (C++/WinRT)
Research Mode API
- Research Mode API is based on a light-weight derivation of COM called Nano-COM.
-
ResearchModeApi.h
struct AccelDataStruct { uint64_t VinylHupTicks; uint64_t SocTicks; float AccelValues[3]; float temperature; }; struct GyroDataStruct { uint64_t VinylHupTicks; uint64_t SocTicks; float GyroValues[3]; float temperature; }; struct MagDataStruct { uint64_t VinylHupTicks; uint64_t SocTicks; float MagValues[3]; }; enum ResearchModeSensorType { LEFT_FRONT, LEFT_LEFT, RIGHT_FRONT, RIGHT_RIGHT, DEPTH_AHAT, DEPTH_LONG_THROW, IMU_ACCEL, IMU_GYRO, IMU_MAG }; DECLARE_INTERFACE_IID_(IResearchModeSensorVLCFrame, IUnknown, "5C693123-3851-4FDC-A2D9-51C68AF53976") { STDMETHOD(GetBuffer( _Outptr_ const BYTE **ppBytes, _Out_ size_t *pBufferOutLength)) = 0; STDMETHOD(GetGain( _Out_ UINT32 *pGain)) = 0; STDMETHOD(GetExposure( _Out_ UINT64 *pExposure)) = 0; }; DECLARE_INTERFACE_IID_(IResearchModeSensorDepthFrame, IUnknown, "35167E38-E020-43D9-898E-6CB917AD86D3") { STDMETHOD(GetBuffer( _Outptr_ const UINT16 **ppBytes, _Out_ size_t *pBufferOutLength)) = 0; STDMETHOD(GetAbDepthBuffer( _Outptr_ const UINT16 **ppBytes, _Out_ size_t *pBufferOutLength)) = 0; STDMETHOD(GetSigmaBuffer( _Outptr_ const BYTE **ppBytes, _Out_ size_t *pBufferOutLength)) = 0; }; DECLARE_INTERFACE_IID_(IResearchModeAccelFrame, IUnknown, "42AA75F8-E3FE-4C25-88C6-F2ECE1E8A2C5") { STDMETHOD(GetCalibratedAccelaration( _Out_ DirectX::XMFLOAT3 *pAccel)) = 0; STDMETHOD(GetCalibratedAccelarationSamples( _Outptr_ const AccelDataStruct **ppAccelBuffer, _Out_ size_t *pBufferOutLength)) = 0; }; DECLARE_INTERFACE_IID_(IResearchModeGyroFrame, IUnknown, "4C0C5EE7-CBB8-4A15-A81F-943785F524A6") { STDMETHOD(GetCalibratedGyro( _Out_ DirectX::XMFLOAT3 *pGyro)) = 0; STDMETHOD(GetCalibratedGyroSamples( _Outptr_ const GyroDataStruct **ppAccelBuffer, _Out_ size_t *pBufferOutLength)) = 0; }; DECLARE_INTERFACE_IID_(IResearchModeMagFrame, IUnknown, "2376C9D2-7F3D-456E-A39E-3B7730DDA9E5") { STDMETHOD(GetMagnetometer( _Out_ DirectX::XMFLOAT3 *pMag)) = 0; STDMETHOD(GetMagnetometerSamples( _Outptr_ const MagDataStruct **ppMagBuffer, _Out_ size_t *pBufferOutLength)) = 0; };