[TOC]
Overview
本文以标定 Realsense D435i 为例。
加速度计的标定利用了加速度计在静止状态下的三轴数据模值等于重力加速度这一条件,采集加速度计在不同状态的静止数据,通过优化算法即可求出标定参数。加速度计单独即可完成标定,陀螺仪的标定需要加速度计数据的参与,所以需要先标定好加速度计。在标定陀螺仪时,IMU从静止状态A,通过一段时间,到了静止状态B,通过陀螺仪可以算出来A到B的旋转矩阵,而通过加速度数据也可以算出来A到B的旋转矩阵,最小化这一差异即可实现优化求解。
Code
- https://github.com/cggos/imu_tk
- imu_tk ROS
- https://github.com/Neil-Oyoung/imu_tk
- Use imu_utils and imu_tk to calibrate the deterministic error and random error of imu
Collect IMU data
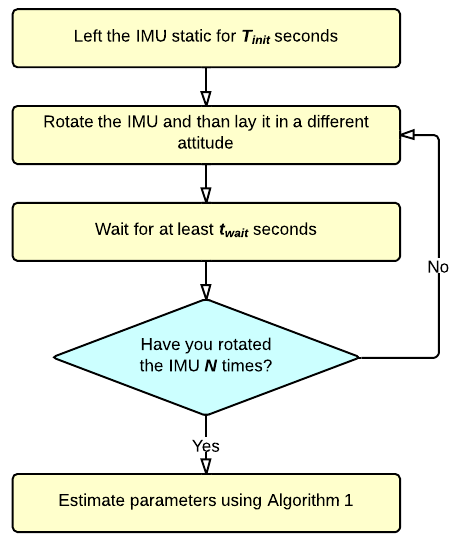
- Procedure:
- Left the IMU static for 50 seconds.
- Rotate the IMU and then lay it in a different attitude.
- Wait for at least 1 seconds.
- Have you rotated the IMU 36 ~ 50 times? If not, go back to step 2.
- Done.
-
录制 rosbag
# start roslaunch realsense2_camera rs_camera.launch # record rosbag record /camera/imu -
rosbag 转 csv 文件
kalibr_bagextractor --bag ~/Downloads/imu_d435i_imu_tk.bag --imu-topics /camera/imu - 拆分 csv 文件 为 acc.mat 和 gyro.mat
- mat数据格式为:时间戳(单位为秒) X轴数据 Y轴数据 Z轴数据,文本的格式为UTF-8无BOM
Build
需要修改代码里的offset和scale,把offset设置为0,把scale设置为1
// test_imu_calib.cpp
init_acc_calib.setBias( Vector3d(0, 0, 0) );
init_gyro_calib.setScale( Vector3d(1.0, 1.0, 1.0) );
mp_calib.setGravityMagnitude(9.8016); // 9.81744
Run
cd bin/
./test_imu_calib acc.mat gyro.mat
Output
Importing IMU data from the Matlab matrix file : /home/cg/Downloads/acc_d435i.mat
Importing IMU data from the Matlab matrix file : /home/cg/Downloads/gyr_d435i.mat
Accelerometers calibration: calibrating...
Accelerometers calibration: extracted 46 intervals using threshold multiplier 2 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.303187e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.22e-03 7.64e-03
1 2.903204e-01 7.27e+01 5.90e+01 2.87e-01 1.00e+00 3.00e+04 1 8.33e-03 1.60e-02
2 2.617510e-01 2.86e-02 1.15e-02 3.27e-03 1.00e+00 9.00e+04 1 7.94e-03 2.40e-02
residual 0.261751
Accelerometers calibration: extracted 46 intervals using threshold multiplier 3 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.320660e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 7.39e-03 7.68e-03
1 2.920290e-01 7.29e+01 5.97e+01 2.87e-01 1.00e+00 3.00e+04 1 8.28e-03 1.60e-02
2 2.637732e-01 2.83e-02 1.15e-02 3.30e-03 1.00e+00 9.00e+04 1 7.47e-03 2.35e-02
residual 0.263773
Accelerometers calibration: extracted 46 intervals using threshold multiplier 4 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.320781e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 6.83e-03 7.05e-03
1 2.906375e-01 7.29e+01 5.99e+01 2.87e-01 1.00e+00 3.00e+04 1 7.65e-03 1.47e-02
2 2.624371e-01 2.82e-02 1.14e-02 3.27e-03 1.00e+00 9.00e+04 1 7.99e-03 2.27e-02
residual 0.262437
Accelerometers calibration: extracted 46 intervals using threshold multiplier 5 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.316700e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 7.16e-03 7.64e-03
1 2.997427e-01 7.29e+01 6.00e+01 2.87e-01 1.00e+00 3.00e+04 1 7.92e-03 1.56e-02
2 2.717076e-01 2.80e-02 1.17e-02 3.22e-03 1.00e+00 9.00e+04 1 7.55e-03 2.31e-02
residual 0.271708
Accelerometers calibration: extracted 46 intervals using threshold multiplier 6 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.318641e+01 0.00e+00 1.17e+03 0.00e+00 0.00e+00 1.00e+04 0 6.83e-03 7.18e-03
1 2.925727e-01 7.29e+01 6.03e+01 2.88e-01 1.00e+00 3.00e+04 1 7.51e-03 1.47e-02
2 2.646989e-01 2.79e-02 1.15e-02 3.19e-03 1.00e+00 9.00e+04 1 8.01e-03 2.27e-02
residual 0.264699
Accelerometers calibration: extracted 46 intervals using threshold multiplier 7 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.322846e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.31e-03 7.56e-03
1 2.962436e-01 7.29e+01 6.06e+01 2.88e-01 1.00e+00 3.00e+04 1 7.85e-03 1.55e-02
2 2.684434e-01 2.78e-02 1.12e-02 3.14e-03 1.00e+00 9.00e+04 1 7.80e-03 2.33e-02
residual 0.268443
Accelerometers calibration: extracted 46 intervals using threshold multiplier 8 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.324374e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.08e-03 7.37e-03
1 2.997994e-01 7.29e+01 6.07e+01 2.88e-01 1.00e+00 3.00e+04 1 7.45e-03 1.48e-02
2 2.720214e-01 2.78e-02 1.10e-02 3.10e-03 1.00e+00 9.00e+04 1 7.58e-03 2.24e-02
residual 0.272021
Accelerometers calibration: extracted 46 intervals using threshold multiplier 9 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.325722e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 6.96e-03 7.21e-03
1 3.011574e-01 7.30e+01 6.06e+01 2.88e-01 1.00e+00 3.00e+04 1 7.99e-03 1.52e-02
2 2.733308e-01 2.78e-02 1.11e-02 3.11e-03 1.00e+00 9.00e+04 1 7.87e-03 2.31e-02
residual 0.273331
Accelerometers calibration: extracted 46 intervals using threshold multiplier 10 -> Trying calibrate...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 7.330019e+01 0.00e+00 1.16e+03 0.00e+00 0.00e+00 1.00e+04 0 7.13e-03 7.45e-03
1 3.019769e-01 7.30e+01 6.05e+01 2.88e-01 1.00e+00 3.00e+04 1 7.92e-03 1.54e-02
2 2.740658e-01 2.79e-02 1.11e-02 3.12e-03 1.00e+00 9.00e+04 1 7.40e-03 2.28e-02
residual 0.274066
Accelerometers calibration: Better calibration obtained using threshold multiplier 2 with residual 0.261751
Misalignment Matrix
1 -0.0010374 0.00307749
0 1 -0.0119756
-0 0 1
Scale Matrix
0.999201 0 0
0 1.00004 0
0 0 1.00224
Bias Vector
-0.0746601
1.5056e-05
0.276673
Accelerometers calibration: inverse scale factors:
1.0008
0.999961
0.997769
Press Enter to continue
Gyroscopes calibration: calibrating...
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 5.638980e-03 0.00e+00 3.06e-01 0.00e+00 0.00e+00 1.00e+04 0 1.21e-01 1.21e-01
1 1.007029e-03 4.63e-03 3.78e-03 1.86e-02 9.99e-01 3.00e+04 1 1.23e-01 2.44e-01
2 1.006868e-03 1.61e-07 2.28e-06 7.60e-05 1.00e+00 9.00e+04 1 1.25e-01 3.69e-01
Solver Summary (v 2.0.0-eigen-(3.3.4)-lapack-suitesparse-(5.1.2)-cxsparse-(3.1.9)-eigensparse-no_openmp)
Original Reduced
Parameter blocks 1 1
Parameters 9 9
Residual blocks 45 45
Residuals 135 135
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_QR DENSE_QR
Threads 1 1
Linear solver ordering AUTOMATIC 1
Cost:
Initial 5.638980e-03
Final 1.006868e-03
Change 4.632113e-03
Minimizer iterations 3
Successful steps 3
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.000056
Residual only evaluation 0.008886 (3)
Jacobian & residual evaluation 0.363018 (3)
Linear solver 0.000043 (3)
Minimizer 0.372046
Postprocessor 0.000003
Total 0.372105
Termination: CONVERGENCE (Function tolerance reached. |cost_change|/cost: 1.906368e-10 <= 1.000000e-06)
Gyroscopes calibration: residual 0.00100687
Misalignment Matrix
1 -0.00349484 0.0091083
0.00376498 1 0.00256356
-0.0125506 -0.00301254 1
Scale Matrix
0.997587 0 0
0 0.994327 0
0 0 0.994757
Bias Vector
-0.00401266
-0.001156
0.00173263
Gyroscopes calibration: inverse scale factors:
1.00242
1.00571
1.00527
-
test_imu_acc.calib
Accelerometers calibration: Better calibration obtained using threshold multiplier 2 with residual 0.261751 Misalignment Matrix 1 -0.0010374 0.00307749 0 1 -0.0119756 -0 0 1 Scale Matrix 0.999201 0 0 0 1.00004 0 0 0 1.00224 Bias Vector -0.0746601 1.5056e-05 0.276673 Accelerometers calibration: inverse scale factors: 1.0008 0.999961 0.997769 -
test_imu_gyro.calib
Gyroscopes calibration: residual 0.00100687 Misalignment Matrix 1 -0.00349484 0.0091083 0.00376498 1 0.00256356 -0.0125506 -0.00301254 1 Scale Matrix 0.997587 0 0 0 0.994327 0 0 0 0.994757 Bias Vector -0.00401266 -0.001156 0.00173263 Gyroscopes calibration: inverse scale factors: 1.00242 1.00571 1.00527
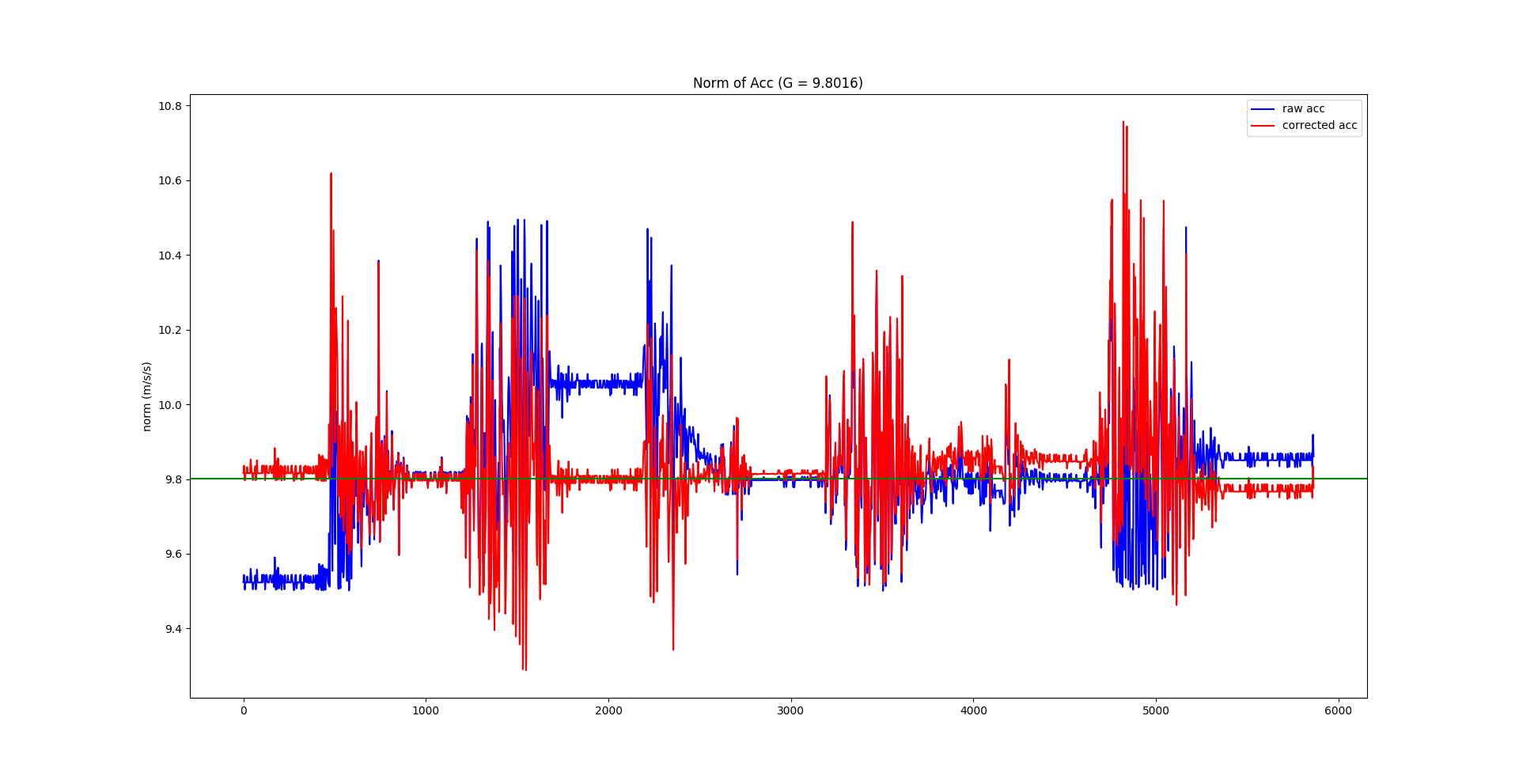
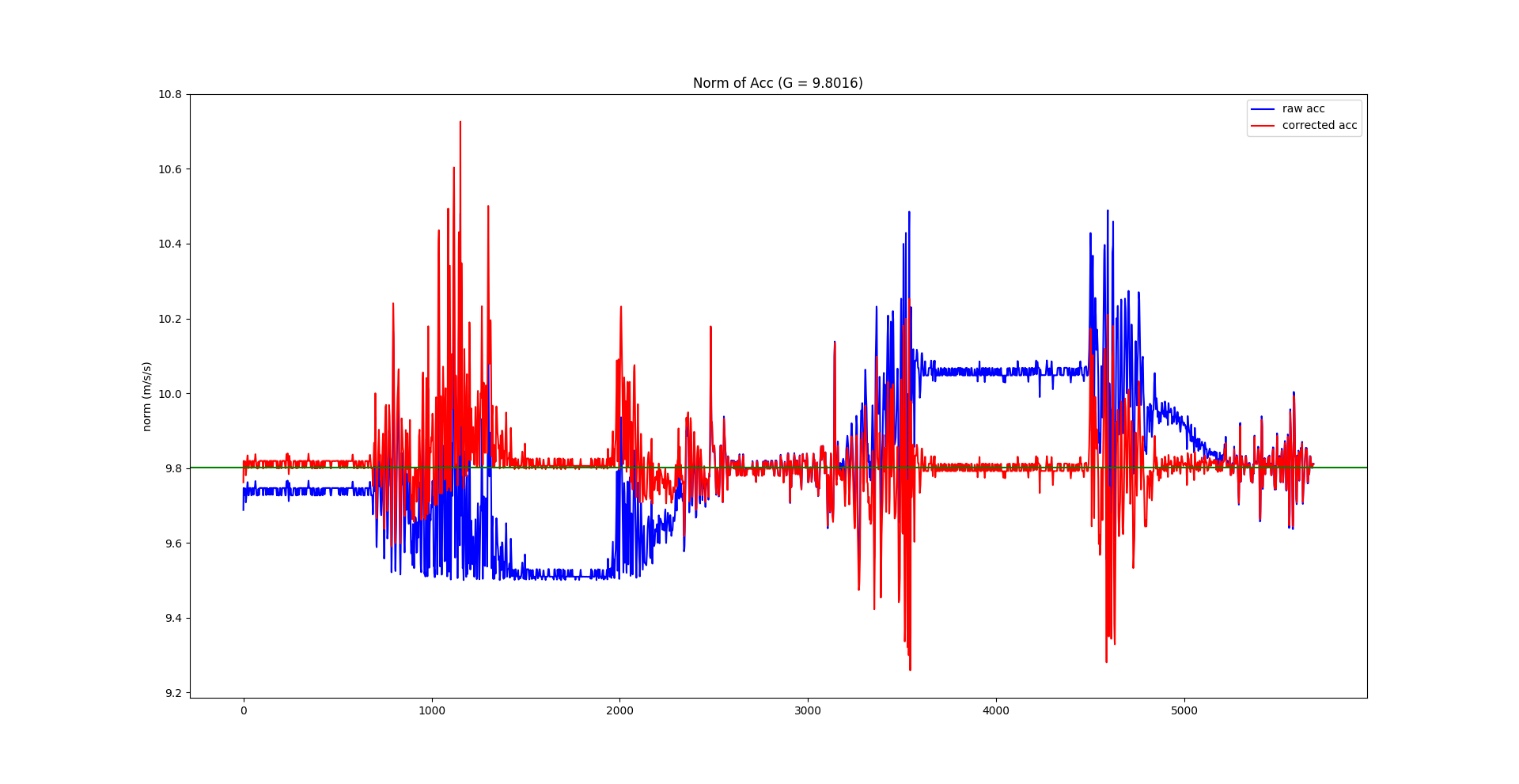
Correction
- code: https://github.com/cggos/imu_tools/tree/kinetic/imu_calib/imu_tk
Given a raw sensor reading X (e.g., the acceleration ), the calibrated “unbiased” reading X’ is obtained.
\[x^\prime = T \cdot K \cdot (x - b)\]Misalignment matrix:
[ 1 -mis_yz mis_zy ]
T = [ mis_xz 1 -mis_zx ]
[ -mis_xy mis_yx 1 ]
Scale matrix:
[ s_x 0 0 ]
K = [ 0 s_y 0 ]
[ 0 0 s_z ]
Bias vector:
[ b_x ]
B = [ b_y ]
[ b_z ]
X' = T*K*(X - B)
Accelerator
PREVIOUSMicrosoft HoloLens Note