[TOC]
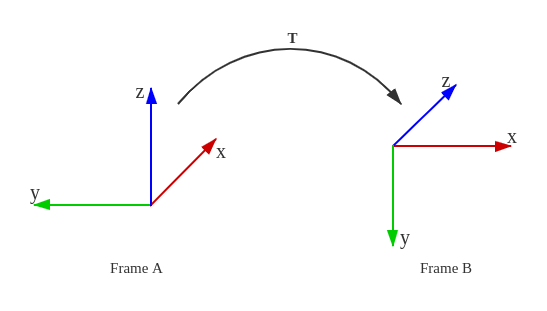
Frame A to B
Frame B 的基向量 到 Frame A 的基向量
\[B = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \Longrightarrow A = \begin{bmatrix} 0 & 0 & 1 \\ -1 & 0 & 0 \\ 0 & -1 & 0 \end{bmatrix}\]则 Frame B 到 Frame A 的 主动旋转 为
\[R_{AB}^a = A\]则 Frame A 到 Frame B 的 被动旋转 为
\[R_{BA}^p = R_{AB}^a = A\]通过在线工具 (https://www.andre-gaschler.com/rotationconverter/) 将 $A$ 转换为 Euler angles (radians, ZYX or YPR)
\[\left[-\frac{\pi}{2} \quad 0 \quad -\frac{\pi}{2} \right]\]Frame Base to Camera
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2)" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_link"
args="$(arg optical_rotate) base_link camera_link 100" />
static_transform_publisher: transform from parent frame to child frame