[TOC]
Overview
- the note is from Apollo Self-Driving Car Lesson
Self-Driving Overview
-
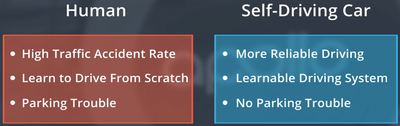
why need self-driving car
-
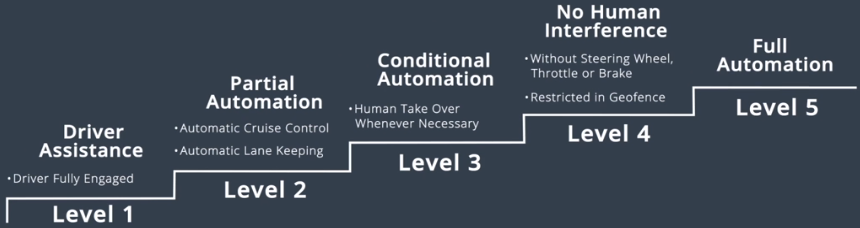
5 driving levels
-
self-driving car history

-
how self-driving car work

-
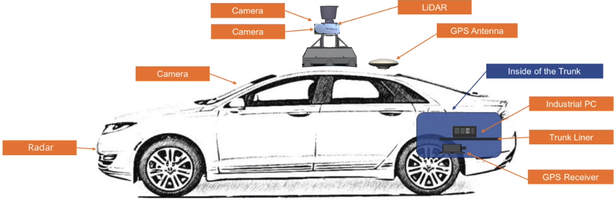
hardware
- Open Sofware Stack
- RTOS: Ubuntu + Apollo Kernel
- ROS
- Decentralization: No ROS Master Scheme
- Protobuf
- Cloud Services
- HD Map
- Simulation
- Data Platform
- Security
- OTA(Over-The-Air) updatea
- DuerOS
High-Definition Map
- 3d representation of the road
- centimeter-level precision
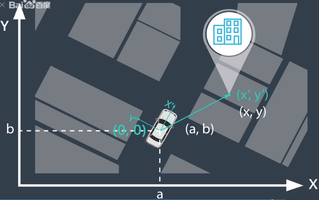
- localization: data match
-
OpenDRIVE standard
-
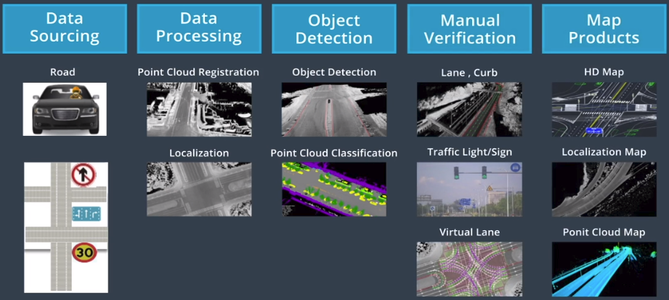
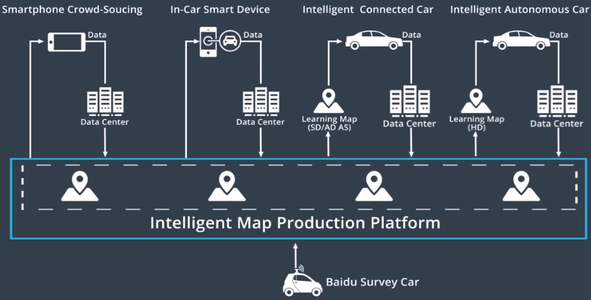
HD map construction
- HD map crowdsourcing
Localization
-
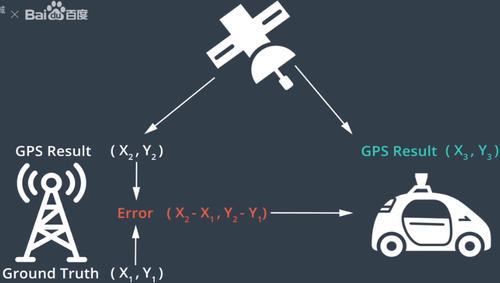
need 10 centi-meter accuracy, but GPS error 1-3 meter
-
localization
-
GNSS RTK
- Inertial Navigation
- accelerator
- gyroscope
- LiDAR localization
- ICP
- filter: Histogram
- advantage: robust
- visual localization
- match
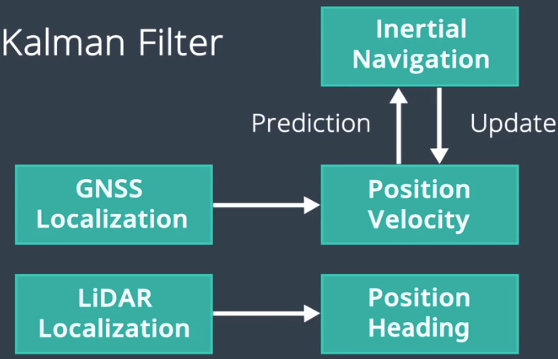
- multi-sensor fusion: kalman filter: prediction(Inertial) and update(GNSS LiDAR)
Perception
-
perception overview
-
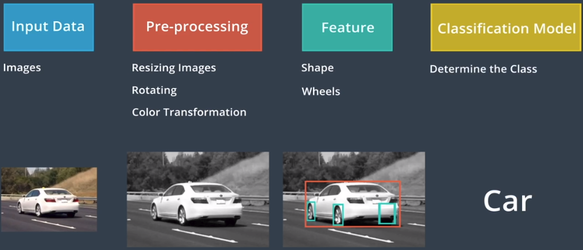
classification pipeline
-
Camera images
-
LiDAR images
- Machine Learning
- born in 1960s
- supervised learning
- unsupervised learning
-
Neural Network
-
Backpropagation
-
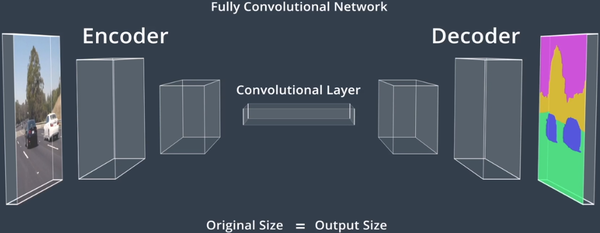
Convolutional Neural Network
-
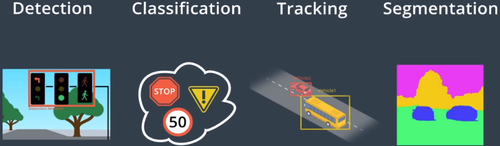
Detection and Classification
-
Tracking
-
Segmentation
-
Sensor Data Comparision
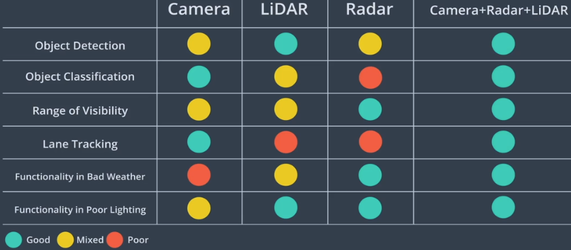
- Perception Fusion
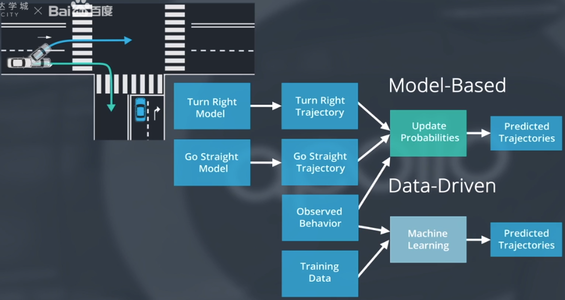
Prediction
- realtime & accuracy
-
approaches: model-based & data-driven
- Trajectory Generation
- polynomial model
Planning
- goal: find the best path from A to B on the map
-
input: map, our position and destination
-
World to Graph
-
A star algorithm
-
3D trajectory
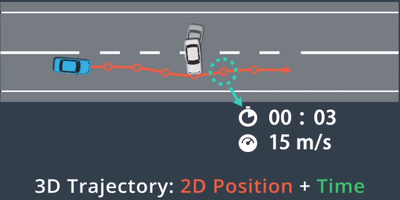
-
Evaluating a Trajectory
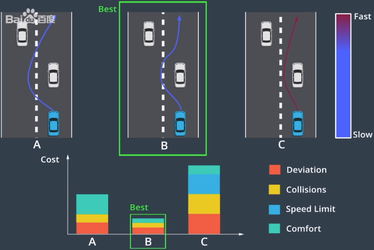
-
Frenet Coordinates
- Path-Velocity Decoupled Planning
Control
-
steering, acceleration and brake

-
PID
-
LQR
-
MPC