Overview
- https://github.com/youngguncho/awesome-slam-datasets
- KITTI Vision Benchmark Suite
- Lifelong Robotic Vision
SLAM
| Dataset | Sample | Params |
|---|---|---|
| TUM VI | <img src=/img/post/benchmark/tum_vi.png width=”80%”/> | |
| TartanAir | <img src=/img/post/benchmark/TartanAir.png width=”80%”/> | |
| ADVIO | <img src=/img/post/benchmark/ADVIO.png width=”80%”/> | |
| NEAR-VI | <img src=/img/post/benchmark/NEAR.png width=”80%”/> |
Autonomous Driving
- 无人驾驶数据集汇总
- https://github.com/hunjung-lim/awesome-vehicle-datasets
| Institution | Dataset | Sample | Params |
|---|---|---|---|
| EPAN Research Group @ UTBM | EU Long-term Dataset | <img src=/img/post/benchmark/EULong-termDataset-Path00.png width=”400px”/> | <img src=/img/post/benchmark/EULong-termDataset-Params00.png width=”300px”/> |
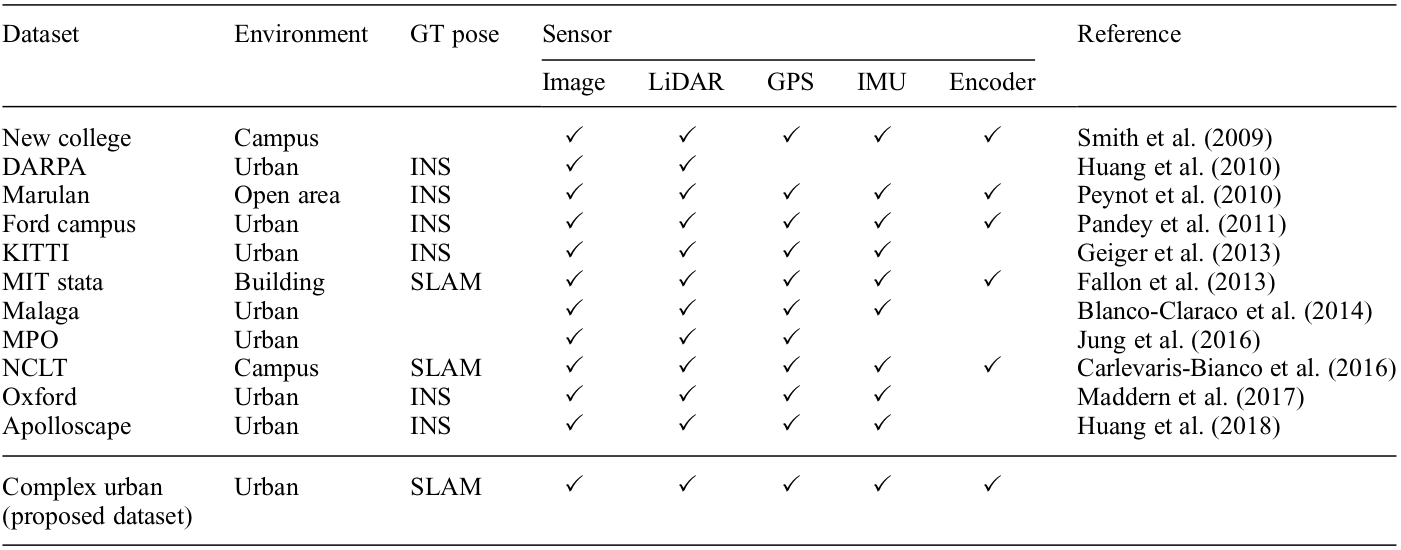
| RPM Robotics Lab @ SNU | Complex Urban Dataset | <img src=/img/post/benchmark/ComplexUrbanDataset-Car00.png width=”400px”/> | <img src=/img/post/benchmark/ComplexUrbanDataset-Params00.png width=”500px”/> |
| IPN Lab @ Polyu | UrbanNav | <img src=https://github.com/IPNL-POLYU/UrbanNavDataset/raw/master/img/hongkong_sensor2.png width=”400px”/> | <img src=https://github.com/IPNL-POLYU/UrbanNavDataset/raw/master/img/calibration_sensors.png width=”500px”/> |
| Waymo Open Dataset |
Mobile Robot
| Dataset | Sample | Params | |
|---|---|---|---|
| ASRL @ UToronto | UTIAS Long-Term Localization and Mapping Dataset | <img src=http://asrl.utias.utoronto.ca/datasets/2020-vtr-dataset/images/ItD_Paton.png width=”80%”/> | |
| Motion-Distorted Lidar Simulation Dataset |
MAV
| Institution | Dataset | Sample | Params |
|---|---|---|---|
| ASL @ EHTZ | EuRoC MAV Dataset | <img src=https://projects.asl.ethz.ch/datasets/lib/exe/fetch.php?w=210&tok=3d9fd6&media=front_side_gray.jpg width=”300px”/> | <img src=https://projects.asl.ethz.ch/datasets/lib/exe/fetch.php?w=400&tok=1dbdef&media=platform.jpg width=”400px”/> |
| RPG @ UZH | The UZH FPV Dataset | <img src=https://fpv.ifi.uzh.ch/wp-content/uploads/2020/09/Are_We_Ready_for_Autonomous_Drone_Racing_The_UZH-FPV_Drone_Racing_Dataset.gif width=”400px”/> | |
| The “Multi-FoV” synthetic datasets | |||
| Urban Robotics Lab @ KAIST | KAIST VIO dataset | <img src=https://user-images.githubusercontent.com/45934290/96549200-222db480-12ea-11eb-8273-30d08be27316.png width=”400px”/> | <img src=https://user-images.githubusercontent.com/45934290/96550443-d419b080-12eb-11eb-805d-dab8393dd6f0.png width=”400px”/> |
PREVIOUSWhen SLAM meets XR and Robotics